
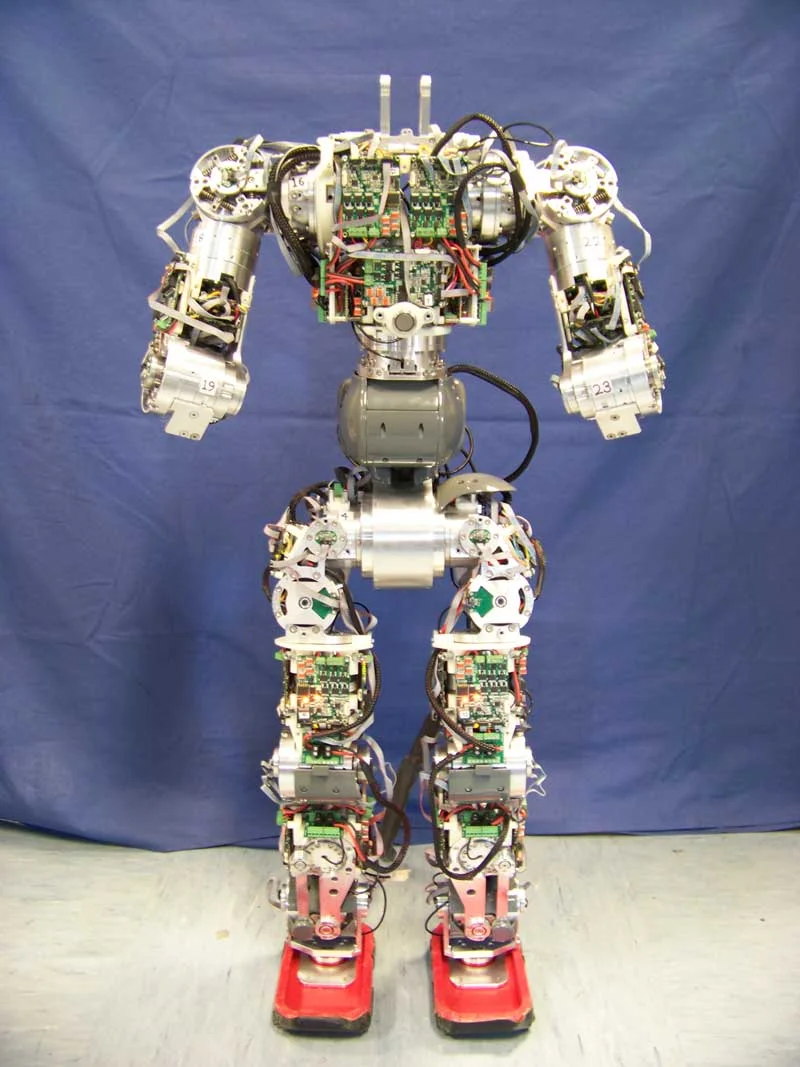

When I joined the Dept. of Advanced Robotics at the Italian Institute of Technology the researchers wanted to explore how compliance can be exploited for safer human robot interaction, reduced energy consumption, simplified control, and faster and more aggressive learning. I was given the task of designing an entire humanoid that incorporated passive series elastic joints with active compliance. 18 months later, the COMAN robot was born.
I was the sole mechanical designer on the COMAN project. Every mechanical part, including the covers, was done by myself, as were all the 2D drawings. I procured all the parts and assembled the first two robots. I used preexisting electronics where possible and coordinated with electronics engineers in the design of custom boards where necessary. I produced documentation including kinematic frame assignments; dimensions, mass and inertia data for individual links; detailed drawings; BOM etc.
In particular, significant improvements over previous designs include:
Passive compliance added to ankle, knee, hip, torso (pitch and yaw), shoulders and elbow
Complete redesign of joint configuration
Elimination of all cable drives
Improved joint ranges
On-board battery - power autonomous for >1 hour
On-board computer
Torque sensing in every joint
Modular design (removable legs, lower legs, arms, upper/lower body)
Fully covered (no exposed wires)
COMAN is now a familiar name in the field of humanoid research. Three of them have been built to date and have been the subject of dozens of conference and journal papers. COMAN was featured on IEEE Spectrum and is listed on Wikipedia as a milestone in the history of humanoid robots.




Images and videos courtesy of the Italian Institute of Technology