

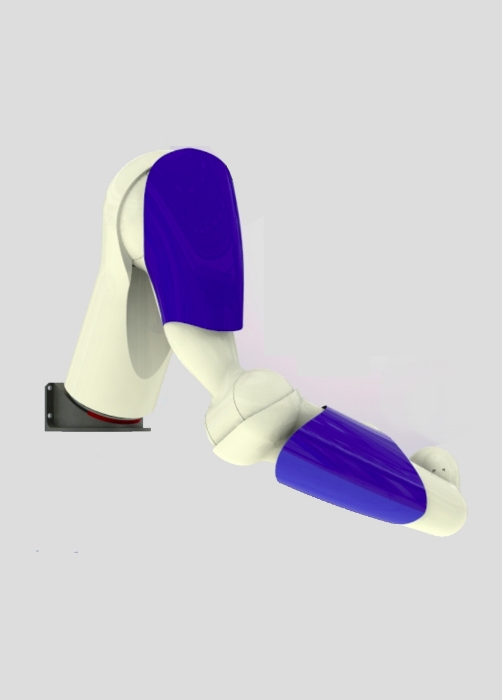
This 7-DOF, humanoid arm is designed for remote teleoperation in applications such as offshore and mining industries. The arm does not contain any Harmonic Drives but instead is driven by SRI’s custom transmissions which deliver higher torque per unit volume than a Harmonic Drive. The actuators and structural links are designed for high stiffness, enabling high-bandwidth tracking of a human operator’s movements. The arm has internal cable routing throughout and the shoulder can be mounted directly to the DURUS humanoid.
I was the project manager for this arm and also lead the system design and integration. The actuators were designed by Motive Mechatronics with input from myself, and I designed the overall arm shape, link structures and covers.
This work was done while I was employed at SRI International.

Initial prototype design
I designed this pair of arms as a technology demonstrator for SRI’s low-cost transmissions. I completed the design for the prototype arms (not including the actuator modules) in two weeks. The compact, anthropomorphic design has 7 degrees of freedom and a slender roll-pitch-roll wrist.



Images and video courtesy of SRI International